Project Highlight: Developing a Marsupial AUV/ASV System
Autonomous launch and recovery capability will vastly expand expand the operational range of Autonomous Underwater Vehicles (AUVs) for a wide range of missions including exploration, monitoring, and mapping. Autonomous Surface Vehicles (ASVs) are an ideal candidate to act as the carrier vehicle, due to their greater range, and surface communications. While autonom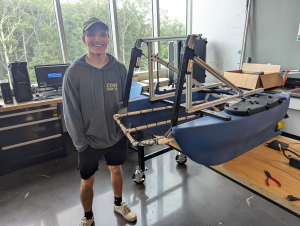 ous launch is becoming more mainstream, autonomous recovery remains out of reach.
ous launch is becoming more mainstream, autonomous recovery remains out of reach.
WHOI Summer Student Fellow Baran Moore developed a recovery mechanism for the lab's ASV Sparrow, by modifying the Blue Robotics BlueBoat platform. Sparrow uses a pair of linear actuators to raise and lower a net, enabling it to recover an AUV at the water surface, without requiring any input from the AUV! Baran's summer work concluded with a successful deployment in Eel pond, where he was able to teleoperate Sparrow to recover Manfred, the lab's low-cost GPS drifter.
We have also developed a perception system for Sparrow, using the ZedX stereo camera module in a waterproof housing, letting Sparrow detect objects floating on the waters' surface and localize them in 3D relative to the ASV. Ongoing work includes developing these perception modules, as well as controllers to autonomously execute the recovery behaviors.

Funding Agency