Project Highlight: Using Physics-Informed Generative AI Models to Enable Adaptive Sampling of Dynamic Coastal Eddies
Headland eddies are highly dynamic coastal flow structures that span kilometers and evolve on the scale of hours. Studying how they change over time will help us understand how they transport marine materials, such as coral larvae. Eddies might transport coral larvae over long distances, acting as a natural seeding mechanism which can be leveraged to support reef restoration efforts. While complex hydrodynamic models can be used to predict eddy formation and evolution, observing them in the real world is a very difficult task due to the ephemeral nature of the eddies.

We are working on developing a real-time observing system for headland eddies that can guide Autonomous Underwater Vehicles (AUVs) to gather in-situ observations around the perimeter and within the eddy, critical data for mapping their 3D structure and how it changes over time. The system consists of a pair of ecoSUB AUVs, which are equipped with an Acoustic Doppler Current Profiler, letting them measure water speed and direction throughout the water column. The ecoSUBs also have WHOI Micromodems, letting them communicate while underwater and share data between the two robots as well as with a base station onshore.
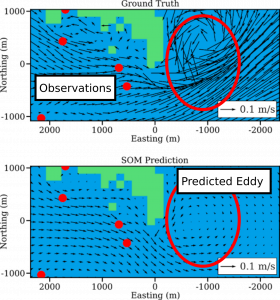
While the AUVs don't have the server-level computational power needed to run the full hydrodynamic model, they do have Nvidia Jetson Orin boards, letting them run compact and efficient surrogate models which can be updated in real-time as the AUVs collect data about the ocean flow. To match the predictive power of the hydrodynamic model, we are using data-driven approaches, replacing on-board computation with offline training. Our first attempt, using a Self-Organizing Map (SOM) showed promising results, including the ability to predict the existence of an eddy in parts of the environment where no direct observations had been made.
However, while effective, the SOM doesn't have any real knowledge of the physics of fluid dynamics, and can make very inaccurate predictions. To address this, we are exploring physics-informed neural networks which incorporate physical laws in the training process to guarantee that the output does not violate dynamics equations. Using the Deep Diffusion Probabalistic Models, we are able to create divergence-free flow fields that accurately reconstruct flow patterns and make predictions in unobserved areas.
These models will be tested on the ecoSUB AUVs in three planned field deployments in Cape Cod Bay and St. John, USVI.

Funding Agency
