Automatic Detection of Marine Mammals for ship-strike and underwater noise mitigation
We develop technologies to automatically detect marine mammals (mainly large whales) in order prevent ship-strikes and protect the animal from loud underwater noise sources.
Scientific background: Ship based detection of marine mammals has a broad range of applications. On the one hand, population ecologists with focus on whale distributions and migratory patterns are interested in effective methods for conducting a census of marine mammals. On the other hand, users of hydroacoustic instruments are interested to most effectively implement reliable mitigation methods if adverse reactions of marine mammals to the ship's presence may be apprehended.
Scientific objectives: Several methods for the detection, identification and localization of marine mammals and will be evaluated. Because whales and seals spend considerable periods of time both at the surface as well as submerged, multiple methods need to be employed in parallel to ensure detection regardless of their location. Under water, vocalizing mammals can be detected by passive acoustic streamer. Its usefulness, however, is currently compromised by intrinsic vessels noise, which will mask particularly low- to mid-frequency vocalizations of the mammals. We will attempt to develop modern signal processing methods to optimally separate the sounds and provide the optimal sensitivity for the bioacoustic signals. Near the surface, whales will be recognized by their warm blow, which stands out against the cold Antarctic environment. For this purpose we are using infrared technology. Here, research will focus on establishing pattern recognition software, to automatically and reliably detect whale blows under varying environmental conditions.
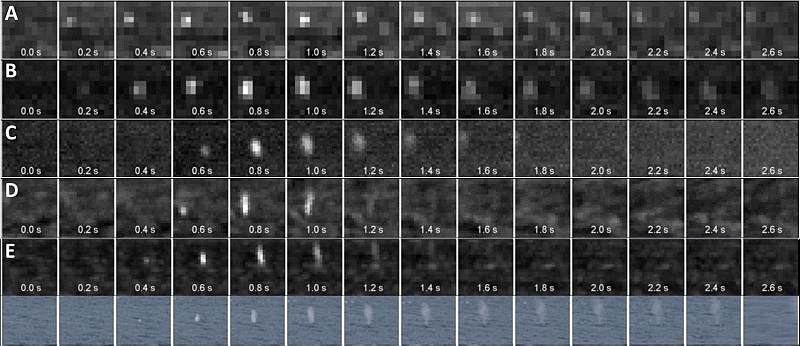
Figure (A-E):
Night-time thermographic video snippets (at 0.2s resolution) of whale blows:
A) 24.03.2012 00:07; 61.11°S 56.36°W; Twater = 1.3°C; Tair = -1.7°C; r = 3608 m;
B) 28.03.2012 03:27; 61.88°S 60.29°W; Twater = 1.4°C; Tair = 2.3°C; r =3608 m;
C) 29.12.2011 01:06; 56.49°S 00.00°E; Twater = -0.8°C; Tair = -0.5°C; r = 1116 m;
D) 01.01.2012 02:38; 43.96°S 07.44°E; Twater = 8.8°C; Tair = 8.7°C; r = 879 m;
E) Day-time thermographic (top) and visual (bottom) video snippets of an automatically detected whale blow: 28.12.2011 14:41; 58.65°S 0.02°E; Twater = -1.5°C; Tair = -0.6°C; r = 1072 m;
Thermal Imaging based automatic whale detection
Here is a Demonstration movie of the automated whale detection system. Once the IR camera (white spinning) detects a whale blow signature, it redirects the visual (PIP) camera to the geolocation the whale was detected. Due to high spatial and temporal resolution of the IR camera, it is likely to capture an automated picture of the whale which then can be used for species identification, allowing the use of this data in habitat suitability models or for abundance estimation.
Funding Agencies
Office of Naval Research (ONR)
Department of Fisheries and Oceans Canada
Transport Canada
Environmenal Sciences Research Fund (ESRF)
Benioff Ocean Initiative (BOI)
Partners/Collaborators
Stellwagen Bank National Marine Sanctuary
Coral Lab University of Vancouver
Department of Fisheries and Oceans Canada
Research Papers
from our group about automatic detection of large whales using thermal imaging