Notable Achievements at WHOI

Jason Junior
As the mechanical design engineer I had responsibility for the mechanical design and construction of the vehicle. Jason Jr. was one of the first deep ocean robots. Aside from developing all of the mechanical systems for the vehicle, I think my most important contribution to this effort was learning how to work well within the WHOI system, from purchasing to the mechanical shops and interface with the Alvin Group.
von Alt, C., Bowen, A. and Bergeron, E.M. "JASON Junior: System Design and Deep Submergence Vehicle Interface.” Intervention 87 Conference and Exposition.
Jason Working as the primary mechanical design engineer I responsible for the overall vehicle layout and design, receiving input from a range of WHOI staff working on the project. I lead the construction and coordinated the eventual testing of the vehicle. Over several years, I assumed a greater role in working with scientists to help them utilize the capabilities of this new tool, participating in many cruises, in most cases as the expedition leader and leading the effort to bring the vehicle into acceptance by the Ocean Science Community and its funding agencies. With Ballard’s retirement from WHOI in 1997 , I assumed the formal leadership role of the Jason Group, managing all aspects of its day-to-day operations.
During this time, I believe my contributions fall within two categories. The first was working hard to make the vehicle system a technical reality, capable of routine operations to 6,000 meters. The second was to work with the funders and users to establish Jason and ROVs in general as useful scientific tools. Notable users during this time were scientists such as John Delaney, Dan Fornari and Paul Johnson. I worked hard to partner with such scientists and convince them that the risks of using such untried technology could pay off and produce good science. Overcoming the technical and social challenges remains an accomplishment of which I am proud.
In addition to working with the mainstream oceanographic community during this time I was also pleased to work with archeologists, teachers and members of the marine safety communities. Not only did we play an important role in bringing new robotic technology to main-stream ocean sciences but set new standards for high quality surveys in the deep ocean that remain to this day as landmark work.
Ballard, R.D., Yoerger, D.R., Stewart, W.K. and Bowen, A. "ARGO/JASON: A Remotely Operated Survey and Sampling System for Full Ocean Depth.” Oceans 91, 1:71-75, 1991.
Bowen, A., Fornari, D., Howland, J. and Walden B., "The Woods Hole Oceanographic Institution's Remotely - Operated and Towed Vehicle Facilities for Deep Ocean Research - Information and Technical Specifications, Version 1.0, July 22, 1993.
Fornari, D.J., Bowen, A.D. and Foster, D.B. “Visualizing the Deep Sea.” Oceanus, Vol. 38, No. 1, 10-13, Spring/Summer 1995.
Bowen, A. “M.V. Derbyshire Phase 2 Survey, Woods Hole Oceanographic Institution Cruise Report 1:209-1:230, In: Williams, R. and Torchio, D.R., M.V. Derbyshire Surveys UK/EC Assessors Report,ï March 1998.
Wall, J.F., Williams, R.A., Torchio, R., Bowen, A. and Glykas, A. “M.V. Derbyshire Colloquium, Survey and Assessment 1996 – 1997.” Royal Institute of Naval Architects, 1998.
Letter from Tony Blair to Bill Clinton acknowledging WHOI’s role on the MV Derbyshire Survey.

Jason 2
With the eventual success of the original Jason ROV came increasing use of the vehicle. During this time, I participated in nearly all of the field programs while having overall responsibility for the technical upkeep on the system and sustaining of a team of well qualified people to operate the system. I continued to be the primarily representative for the system with both the funding agencies and user communities.
As demand for the vehicle expanded, it also became clear that our initial design was too conservative and perhaps not sufficiently directed toward providing an ALVIN-like capability in terms of payload and manipulative functions. As a result and with support from NSF and WHOI, a program to revise the Jason vehicle began. In its second incarnation, Jason pushed to the edge of what could be done within the limitations of what had become the standard fiber optic oceanographic cable. The overall program responsibility for this re-design rested on my shoulders.
Partially as a result of our success in performing the MV Derbyshire survey for the UK’s Government, we secured additional funds to build a second vehicle (Isis) destined to become a national asset for that country’s ocean science community. This involved overcoming technical challenges associated with place a new vehicle into the hands of an operational group other than our own.
Jason 2 has since gone on to be regarded as the gold standard of deep-diving scientific ROVs and the system remains in high demand, often performing 4 or 5 cruises a year, worldwide. True to DSL’s roots, we continue to seek new capabilities for the system while ensuring the vehicle is a reliable tool for science. Robert Elder, Andrew D. Bowen, Matthew Heintz, Matthew Naiman, Christopher Taylor, William Sellers, Jonathan C. Howland, and Louis L. Whitcomb. Jason 2: A Review of Capabilities. In EOS Transactions of the American Geophysical Union 2003 Fall Meeting Supplement, 84(46) Abstract OS32A-0226, San Francisco, December 2003.
Bowen, A., Fornari, D., Howland, J. and Walden B. "The Woods Hole Oceanographic Institution's Remotely - Operated and Towed Vehicle Facilities for Deep Ocean Research - Information and Technical Specifications”, Version 1.0, July 22, 1993.
National Deep Submergence Facility Director
With retirement of Barrie Walden from WHOI, I assumed leadership of the NDSF. While there remains a strong technical component to this responsibility, it is primarily an administrative task, relating to the management of a large diverse group of people who sustain and operate ALVIN, Jason and the AUV Sentry. The annual operating budget for the Facility is approximately $3-4M. This include both the costs of mounting the various planned field programs and also the engineering and upgrades needed to ensure the vehicles remain at the leading edge of undersea technology. Aside from managing the day-to-day operations of the Facility, I interact heavily with internal WHOI management, the funding agencies (NOAA, ONR and NSF) and the scientific users of the assets.
Bowen, A., Fornari, D., Howland, J. and Walden B. "The Woods Hole Oceanographic Institution's Remotely - Operated and Towed Vehicle Facilities for Deep Ocean Research - Information and Technical Specifications”, Version 1.0, July 22, 1993.
Bowen, A. and Walden, B.B. "Manned Versus Unmanned Systems: A Complimentary Approach.” Marine Technology Society Journal, Vol. 26, No. 4, 79-80, Winter 92-93.
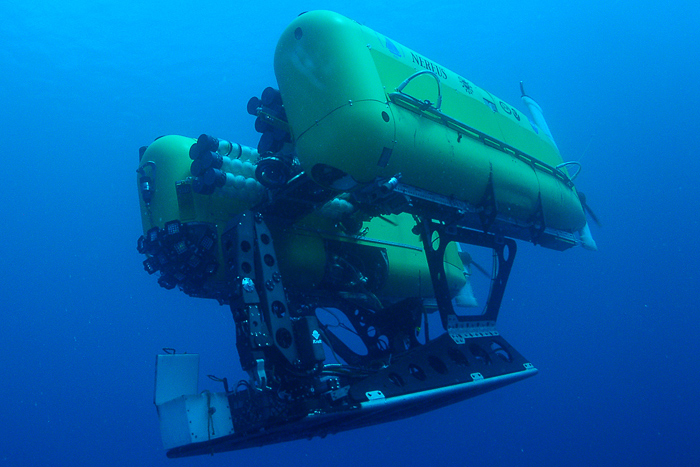
Hybrid Vehicle Nereus and Future Development
It remains a personal priority to continue with the development of new technologies relevant to ocean sciences and I try to balance my administrative responsibilities against new and exciting projects. During the past several years I have been leading the development of the Nereus hybrid vehicle. The challenges inherent in this project have been significant and I am proud of the success achieved. Conceiving, designing, building and testing a vehicle capable of reaching 11,000 meters is the pinnacle of undersea robotic challenges.
To overcome these challenges has required bringing together 3 Federal Funding Agencies to support a team made up of the most talented individuals I have had the pleasure of working with. While the project has been centered at WHOI, the team has been made up of people from other research and government laboratories, making Nereus the product of a large and diverse group.
Indeed, I believe that our solution to the 11,000 challenge has resulted in an important vehicle that has shown a new way forward applicable to “shallow” systems. While material advances such as ceramics, low-power manipulation, large scale energy storage and efficient lighting and imaging are important, it is likely that continued re-definition of how vehicles are tethered will be one of the Nereus Project’s lasting legacies.
Looking forward to new challenges, it is clear that further advances in vehicle technologies will create important opportunities to both improve access to the sea and open new opportunities for exploration not previously available.
Bowen, A.D., Yoerger, D.R, Taylor, C., McCabe, R., Howland, J., Gomez-Ibanez, D., Kinsey, J.C, Heintz, M., McDonald, G., Peters, D.B., Bailey, J., Bors, E., Shank, T. “Field Trials of the Nereus Hybrid Underwater Robotic Vehicle in the Challenger Deep of the Mariana Trench.” In Proceedings of IEEE/MTS Oceans 2009, Mississippi, October 26, 2009.
Bowen, A., Jakuba, M., Yoerger, D., German, C., Kinsey, J.C., Whitcomb, L.L., Mayer, L. "Lightly tethered unmanned underwater vehicle for under-ice exploration," Aerospace Conference, 2012 IEEE , vol., no., pp.1-12, 3-10 March 2012 doi: 10.1109/AERO.2012.6187038
Bowen, A. D., D. R. Yoerger, C. C. German, J. C. Kinsey, M. V. Jakuba, D. Gomez-Ibanez, C.L. Taylor, C. Machado, J. C. Howland, C. L. Kaiser, M. Heintz, C. Pontbriand, S. Suman, L. O’hara, L. L. Whitcomb, C.J. McFarland, and L. Mayer. Design and preliminary engineering trials of Nereid-UI: A remotely operated underwater vehicle for oceanographic access under ice. In Proceedings IEEE/MTS Oceans Conference and Exhibition, St. Johns, Canada, Sept. 2014.
Bowen, A.D., M.V. Jakuba, N.E. Farr, J. Ware, C. Taylor, D. Gomez-Ibanez, C.R. Machado, and C. Pontbriand (In press) “An Un-Tethered ROV for Routine Access and Intervention in the Deep Sea.” MTS/IEEE OCEANS 2013 Conference, San Diego, CA, 23-26 Sept.