Blog
PhD student Miad Al Mursaline has been working on updating scattering models to include the pitch observed in longlines by the scientific echosounder. Existing models do not describe the scattering physics adequately for this application, so he is conducting experiment and expanding theory to provide a way to better characterize line location, and also potentially…
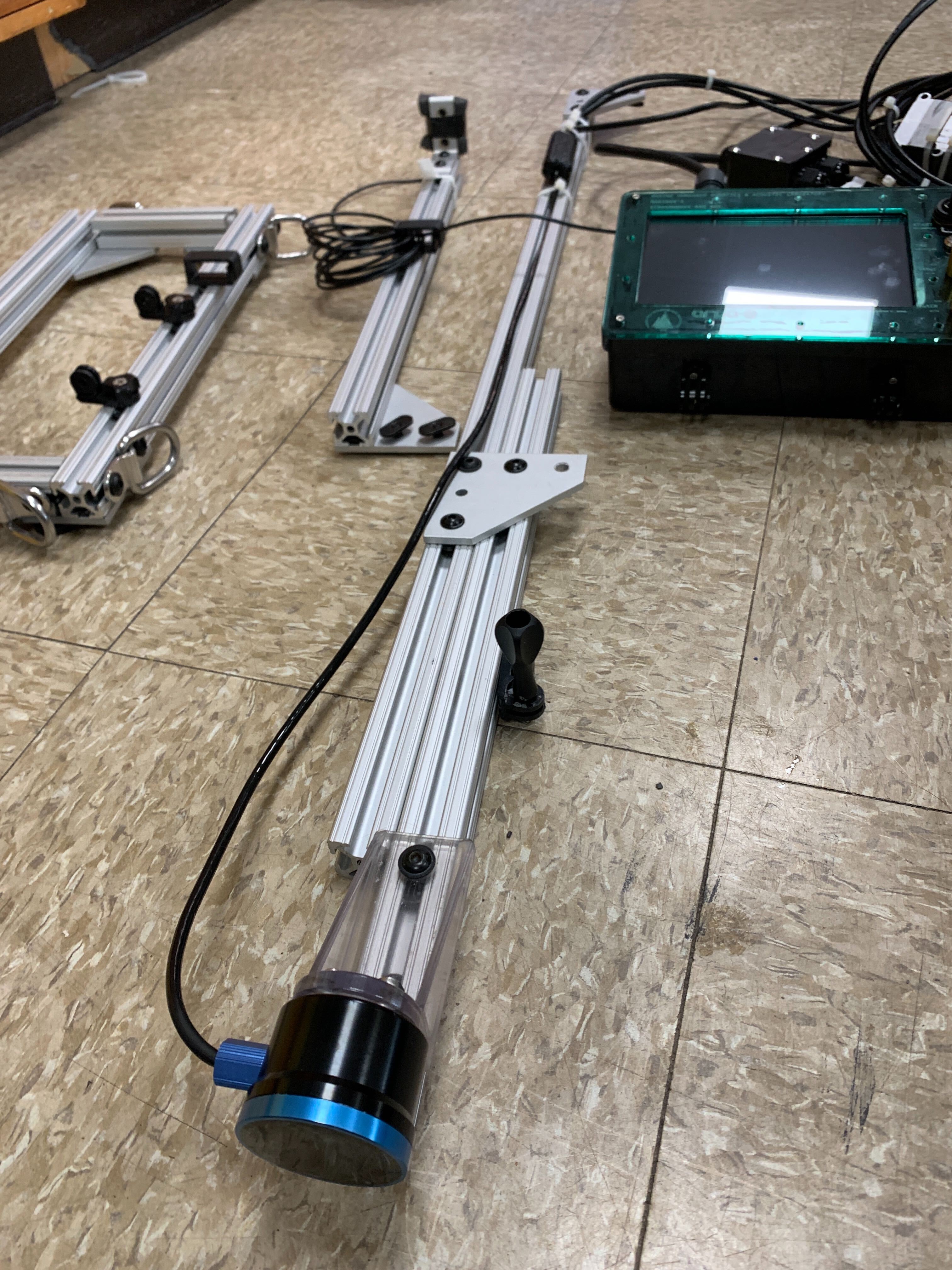
With fieldwork cancelled March through June, the WHOI KelpBot team focused on development of a prototype low-cost ARPA-E MARINER Echosounder DAQ Box (LC-EDB), based around the BlueRobotics Ping 120 kHz echosounder. This system includes some of the features found in a commercial fish finder, in addition to logging pose data from an IMU (roll/pitch/yaw), GPS…

KelpBots Snoopy and Darter ran at the UNE kelp farm in Saco Bay, ME to collect a full suite of information on recently-planted kelp lines. Key data collected includes echograms from the Simrad EK80 scientific echosounder, “kelpcam” as 360 degree camera system, and environmental sensors. (Above) Example scientific echogram showing 5-line kelp array; (Below) vehicle…

Snoopy and Darter are engineering tested and ready to go with full sensing functionality for the 2020 field season for ARPA-E MARINER! Exciting new addition from last year: KelpCam, a multi-camera system for capturing the complexities of aquaculture farms.

The team traveled with Snoopy (REMUS100) to Santa Barbara Channel in California to work with collaborators at UCSB in surveying giant kelp. The objective: comparative scientific echosounder and sidescan data, with the hopes of providing some calibration on sidescan.

Bad weather leads to a divide and conquer approach to spring 2019 surveys in collaboration with teams at University of New England (UNE) and University of New Hampshire (UNH). The JetYak autonomous surface vehicle traveled to UNE with WHOI team members Kevin Manganini and Michelle Fleming for comparative low-cost and scientific echosounder surveys. Snoopy, a…

Location: Saco Bay, Maine During the last week of May, our team traveled to Saco Bay, Maine to work alongside macroalgae researchers at the University of New England. We tested one of our REMUS AUV’s equipped with a sophisticated split beam sonar system, environmental sensors and cameras along their sugar kelp line. In addition to…
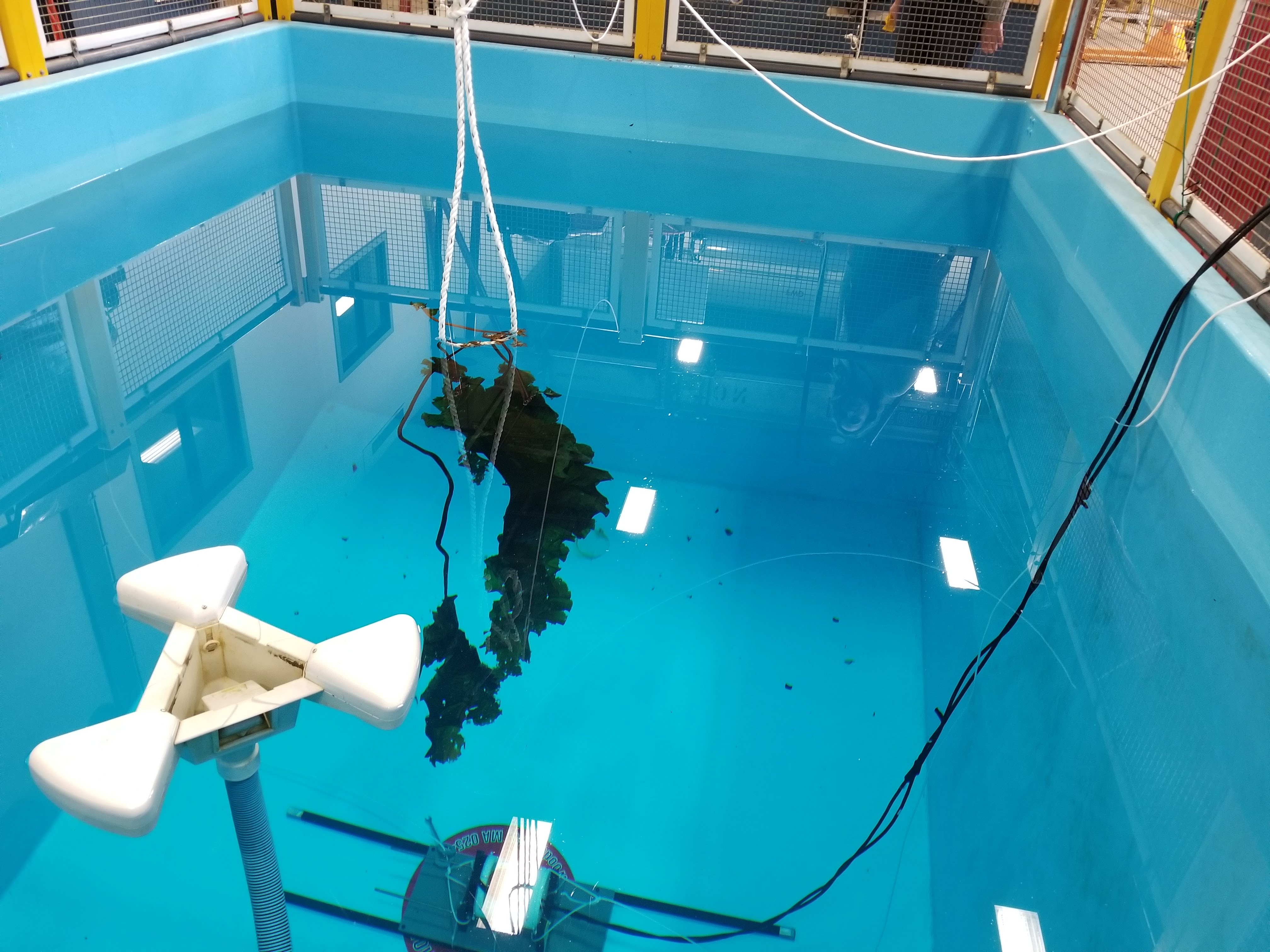
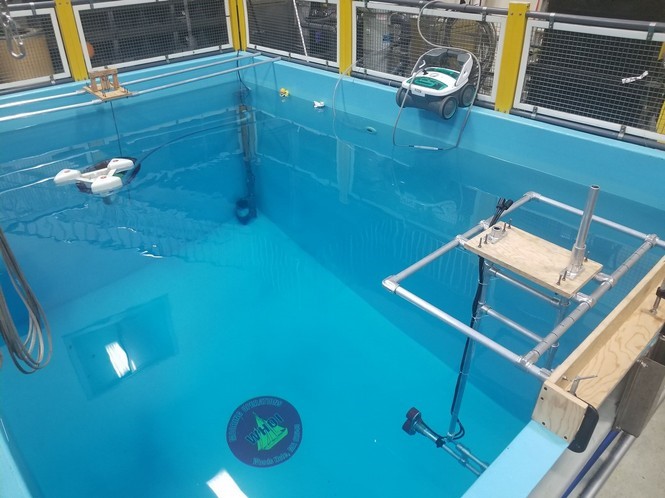
In early April, we ran a set of experiments in the WHOI Coastal Research Lab tank to learn more about what kelp will look like in our split-beam sonar system. Better to have a “dry” run where everything is still, before integrating the sonar with one of the kelpbots, Snoopy! The 200 kHz/333 kHz active…