Projects
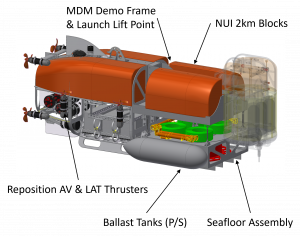
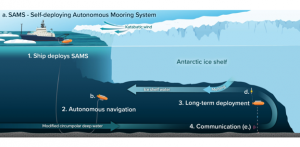
SAMS: SELf-Deploying Autonomous Mooring System
PIs: Catherine Walker, Gordon Zhang
Engineering Leads: Mike Jakuba, Don Peters, Chris Taylor

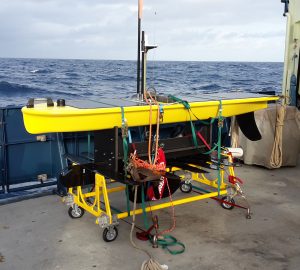
Tethys AUVs (MBARI LRAUV) at WHOI
We have been developing new concepts of operation and payloads for Tethys-class long range AUVs (MBARI LRAUV). The vehicles were designed by the Monterey Bay Aquarium Research Institute (MBARI) and are equipped with WHOI-designed payloads. The vehicles are capable of ranges between 300 and 1500 km depending on payload and battery chemistry. The LRAUV program at WHOI was led by former engineer Amy Kukulya until her departure in 2023.
Projects include yearly participation (2023-2026, ongoing) in the NEFSC scallop biomass assessment, sustained monitoring of marine infrastructure impacts on downstream biological and physical oceanography, winter ecology observations in Lake Erie, generation of real-time zooplankton abundance maps from an innovative shadowgraph imager payload; and integration of particle imaging camera (UVP) for imaging particles along a 1300+ km transect between coastal Massachusetts and Bermuda.
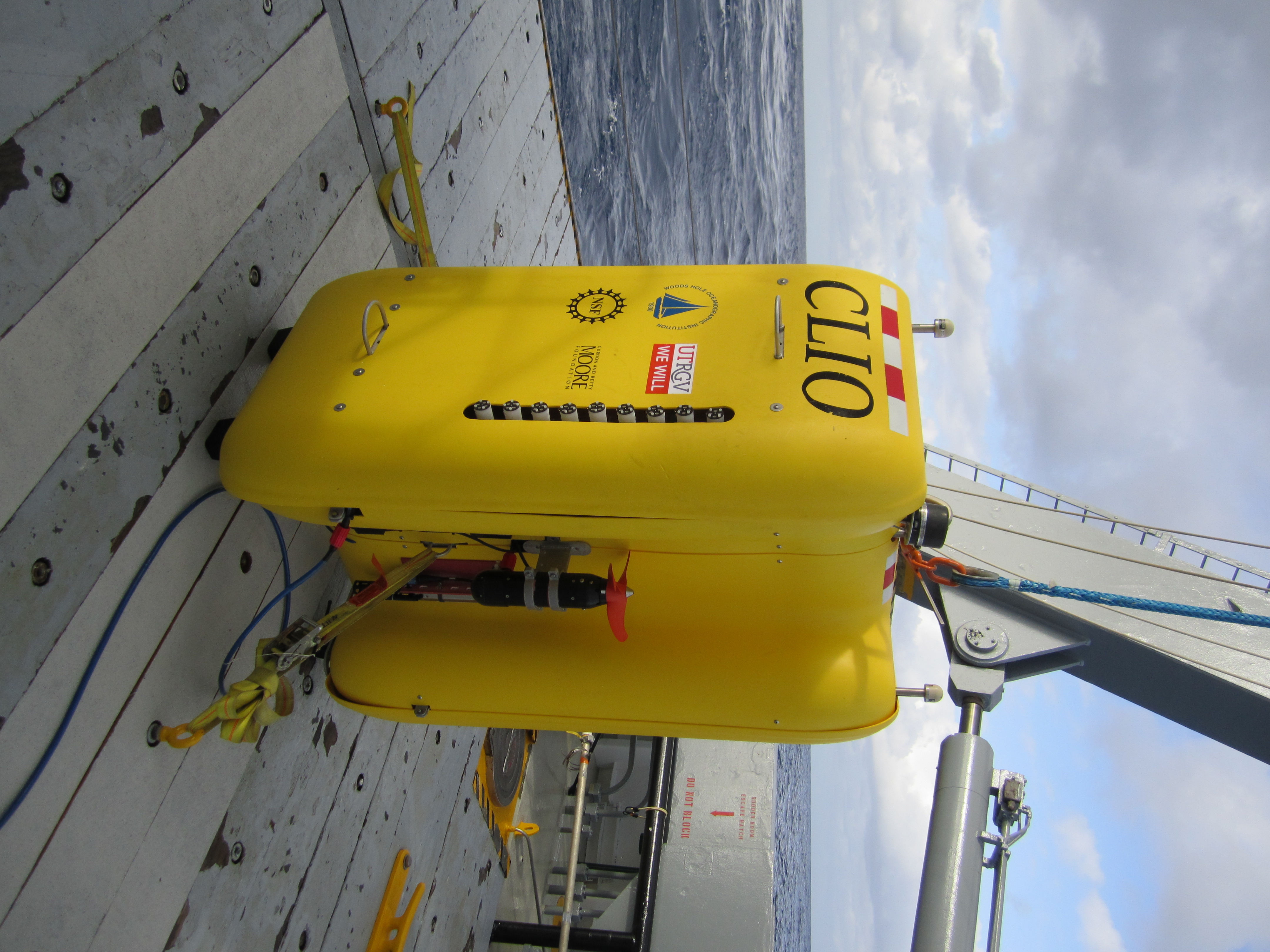
Clio on board the Atlantic Explorer during a 2019 transect cruise.
Clio AUV
Clio is a 6000 m rated vertical profiling AUV designed specifically for "-omics" sampling of the water column. Clio filters 1000s of liters of seawater on a dive to concentrate biological material on filters that are extracted from the vehicle upon recovery. Clio has been designed specifically to complement conventional wire-based sampling techniques—to operate simultaneously and independently of conventional techniques to improve ship-time utilization.
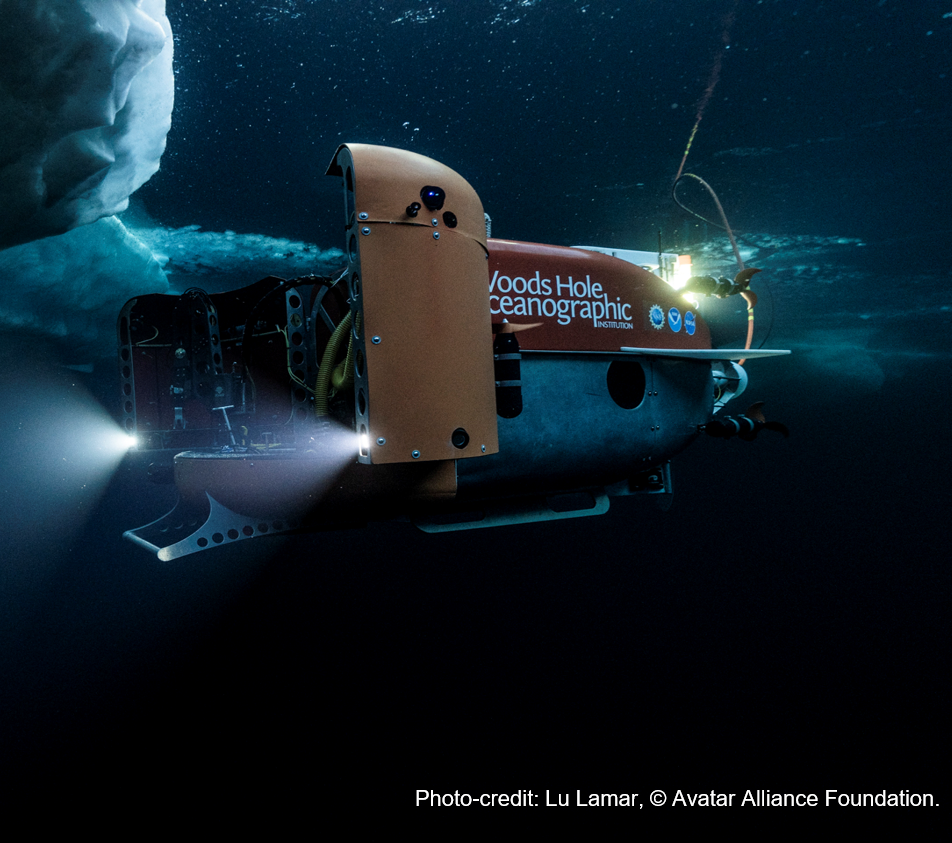

NUI hybrid remotely operated vehicle (HROV)

Recovering a OWTTIUSBL-equipped Sea Glider during a cruise off Santa Barbara CA in November 2020.
Low Power Navigation (OWTTIUSBL)
Oceanographic gliders are marine robots capable of deployments lasting months. Typically they collect profiles of fundamental ocean properties (temperature, salinity, etc.), measurements that do not require high fidelity navigation. Gliders rely on infrequent GPS fixes while at the surface and model-based dead-reckoning to estimate their position. If gliders could be navigated precisely, these vehicles could perform novel missions and spend more time submerged "deep-profiling" without unbounded growth in positioning error. We are developing a one-way travel-time inverted ultra-short baseline (OWTTIUSBL) navigation system specifically suited to navigating teams of subsea gliders. The system consumes less than 1 W on average, making it compatible with glider energy budgets. This work is in collaboration with UW-APL.

Tether survivability in Europan ice
Jupiter's moon Europa hosts an liquid water ocean beneath an icy shell perhaps 10 km thick. Tidal flexing from Europa's eccentric orbit around Jupiter creates heat that may drive hydrothermalism on the seafloor, supplying an energy source that could support alien life. NASA is investing in technologies to enable a future robotic probe to visit Europa's ocean and search for life. That probe will need to communicate its findings back to the surface for relay to Earth. One possible means of communication is a lightweight tether like we use on NUI. But such a tether would have to survive extreme cold, movement of the ice, and likely also faulting in the brittle outer layer of the shell. Lightly armored tethers tested so far have shown surprising resilience to shearing at temperatures down to at least -70 C. This work is in collaboration with LDEO and JHU-APL.
AUV Tender
I manage the Consortium for Marine Robotics (CMR) Wave Glider. We use the vehicle for robotics development, primarily as the surface component of a vehicle team, for example to tend the Sentry AUV. By freeing the ship from the responsibility of tending the AUV, the Wave Glider increases the ship time available to conduct other science. The Wave Glider acts as an communications relay allowing operators on board the ship, or on shore, to monitor the AUV's status and alter its mission in response to data or logistical considerations.
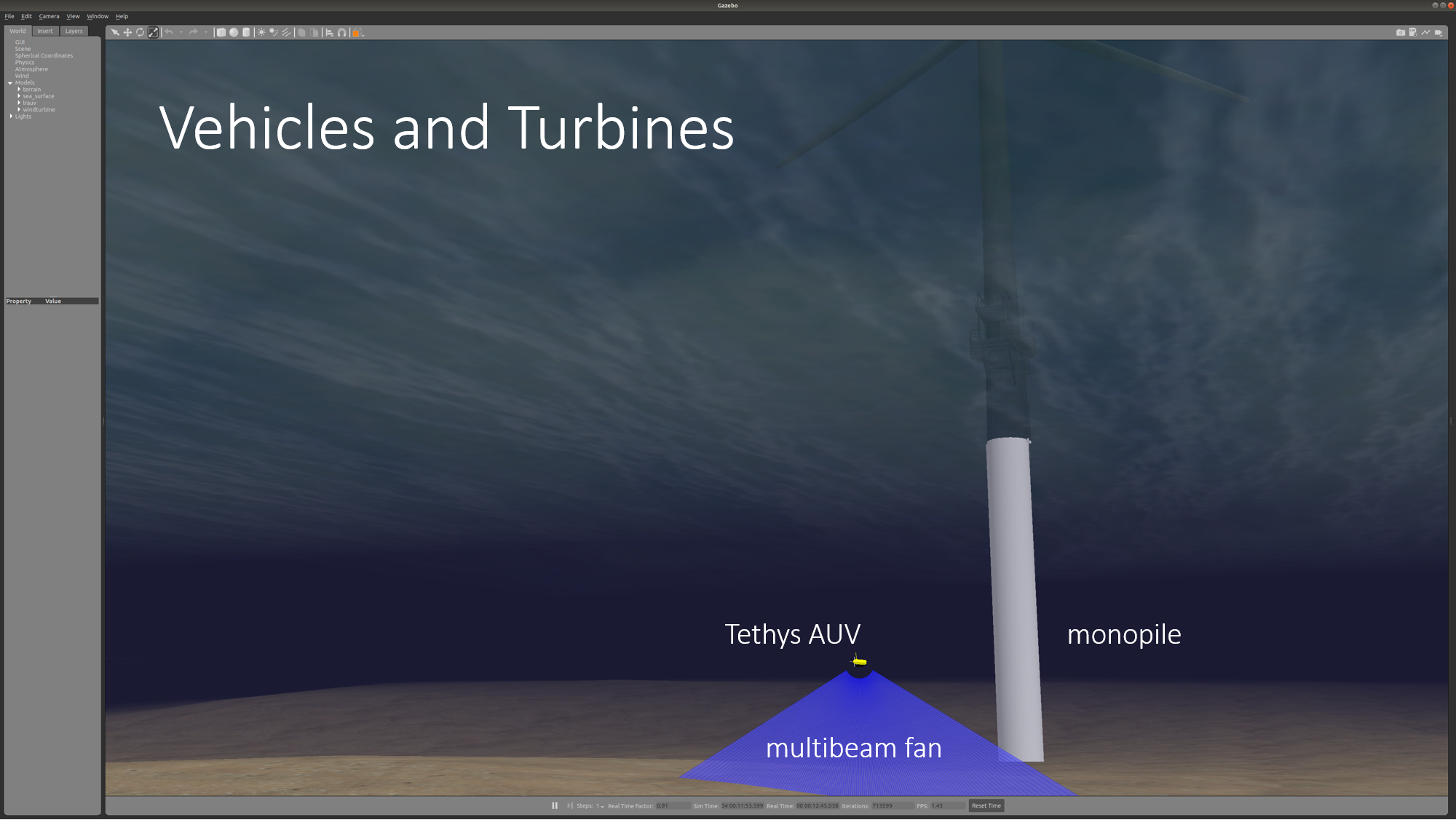
New England Shelf Marine Robotics Simulator
The success of massive investments in installations planned for the New England Shelf (NES) depends accurate determination of the impact of these installations on the environment and stake holders, and vice versa. Monitoring and observation technology will be critical. Marine robotics---autonomous and remotely operated surface and underwater vehicles---are perhaps uniquely suited to cost-effective sustained monitoring of the environment and spatially distributed offshore wind infrastructure planned for the NES. Launched from shore or resident on site to eliminate the costs associated with tending vessels, robotic vehicles could dramatically cut costs, expand the weather window in which monitoring operations can be executed, and facilitate large scale data collection suitable for automated processing. We are working to speed the transition of existing marine robotics technologies into the specific domain of the New England Shelf (NES) planned offshore wind installations through immersive and comprehensive simulation leveraging ROS/gazebo and AWS Robomaker.

TideRider: A low cost coastal profiling float
Coastal ecosystem stressors such as hypoxia, marine heatwaves and harmful algal blooms require new technologies to properly monitor and predict. Instrumented buoys, gliders, profiling floats, and shore stations are all applicable to the coastal domain, but all face certain limitations that prevent deployment in large numbers. We designed TideRider, easy to build, $1600 profiling floats intended primarily for coastal water quality monitoring. TideRiders profile between the surface and seafloor, resting on the seafloor between profiles. By timing ascents and descents, it is possible to opportunistically harness ambient currents to move the devices in a controlled way, e.g., toward a waypoint, or to hold station as a "virtual mooring." This capability was demonstrated in a series of field tests in summer 2022 and 2023 and the operationally during deployments for the COMBB project with Woodwell Climate Research
View the latest positions and status from any active TideRiders (summers only): https://tide-rider.github.io/ (you may need to use an incognito window).
Read more here: https://ieeexplore.ieee.org/abstract/document/10244639
People: P. McGuire, M. Jakuba, J. Partan, F. Zhang