Acoustic Technology for Glider Long-Range Under-Ice Navigation & Communications: Glider Mission to the North Pole
Collaborators: Andrey K. Morozov, Thomas W. Altshuler, Clayton P. Jones, Lee E. Freitag, Peter A. Koski, Hanne Sagen, Stein Sandven
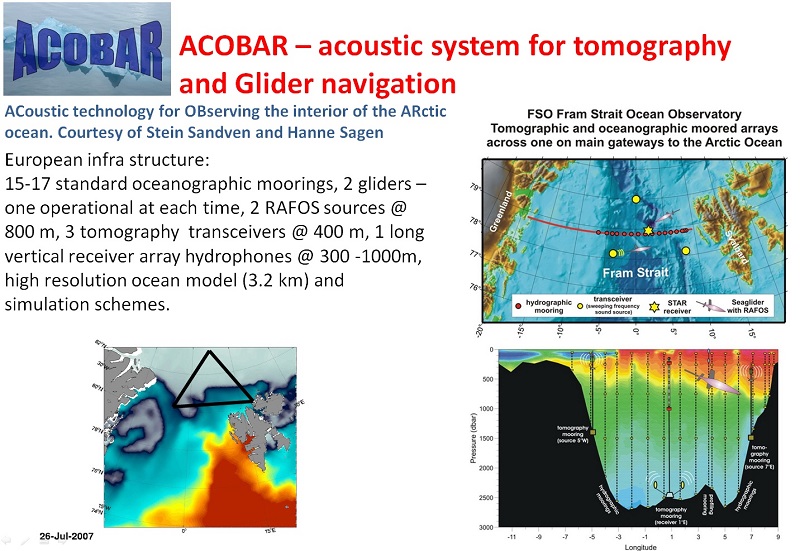
Seventeen moorings, 2 gliders, 2 RAFOS sources, 3 transceivers, 1 VLA, high resolution ocean model (3.2 km) and simulation schemes.
Gliders and long-range AUVs could provide persistent, high-resolution, basin-wide sampling in ice-covered regions. However, navigation and telemetry for these platforms relies on satellite positioning (GPS) and communications (Iridium, ARGOS) that are poorly suited for areas where partial or complete ice cover restricts access to the sea surface.
Although the data rate of long-range acoustic communications is much less than satellite communications and the precision of acoustical navigation is not comparable with a GPS, the underwater acoustical systems are the only way to provide basin-wide geo-location and telemetry in ice-covered regions while allowing the research community to employ AUVs and gliders to address a wide range of problems in Arctic research. The modern acoustical technology for basin scale, region scale tomography communications, and navigation is considered.
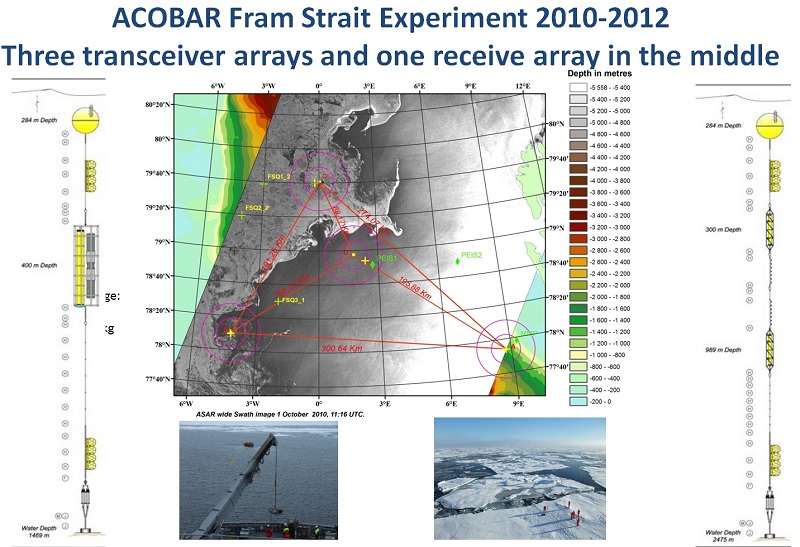
ACOBAR Fram Strait Experiment 2010-2012 (Hanne Sagen).
The existing underwater navigation systems are based on the traditional 260 Hz 780 Hz RAFOS narrow band organ-pipe sound sources with temperature compensated quartz clocks. Such systems appear very unreliable (Workshop on Acoustic Navigation and Communications for High-latitude Ocean Research (ANCHOR) 2006, UW, Seattle, Washington; WHOI ACOBAR workshop 2006 ). We suggest powerful, broadband 100 Hz swept frequency sound sources with high precision atomic clocks, which can essentially increase precision and range for underwater navigation. Such sound sources are currently used in the FRAM Strait ACOBAR system for tomography and glider navigation. A possibility to build an affordable very low-frequency sound source with frequency range below 100 Hz for basin scale underwater navigation and long-range communications is considered.
Autonomous vehicles can’t survive in a long-term mission without duplex underwater communications and reliable long-range navigation. Although early investigation shows that for long-range Arctic propagation the signal frequency must be below 50 Hz, many Arctic researchers have observed a good signal for a carrier of 780 Hz at a distance of more than 100 miles. The Arctic environment is changing; as ice-thickness decreases, the expanding fresh water layer from melting ice is shielding the underwater ice roughness and making reflection from ice more stable. The propagation conditions in the Arctic should be revised.
Long-range underwater communications with a glider needs a small, light and high efficient low frequency sound source. Such a sound source was designed and built on the basis of a composite carbon-fiber and tested during the September 2010 voyage of the ice-breaker Svalbard. The source has 694 Hz resonance frequency with approximately 20 Hz bandwidth and weight - 6.75 kg in water. Source radiation parameters are: SPL 186 dB re 1 micropascal at 1 m, efficiency > 50% with the directivity gain 3 dB. Although sound source was transmitting from a depth of only 100 meters, we see an intensity signal from one hydrophone at a distance 100 km in the area completely covered by ice. Such promising results will allow us to design an efficient long-range system for under-ice glider control and navigation.
Duplex under-ice communications allow combining a group of gliders into an underwater network and increasing the operational area. Such systems will support long-term missions in the Arctic and will make glider missions to the North Pole possible.
Funding Agencies
The European Union's Framework Program for Research and Technological Development, the Research Council of Norway, and Statoil.