Projects

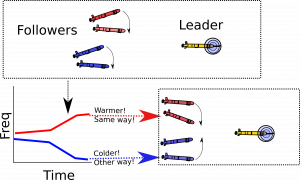
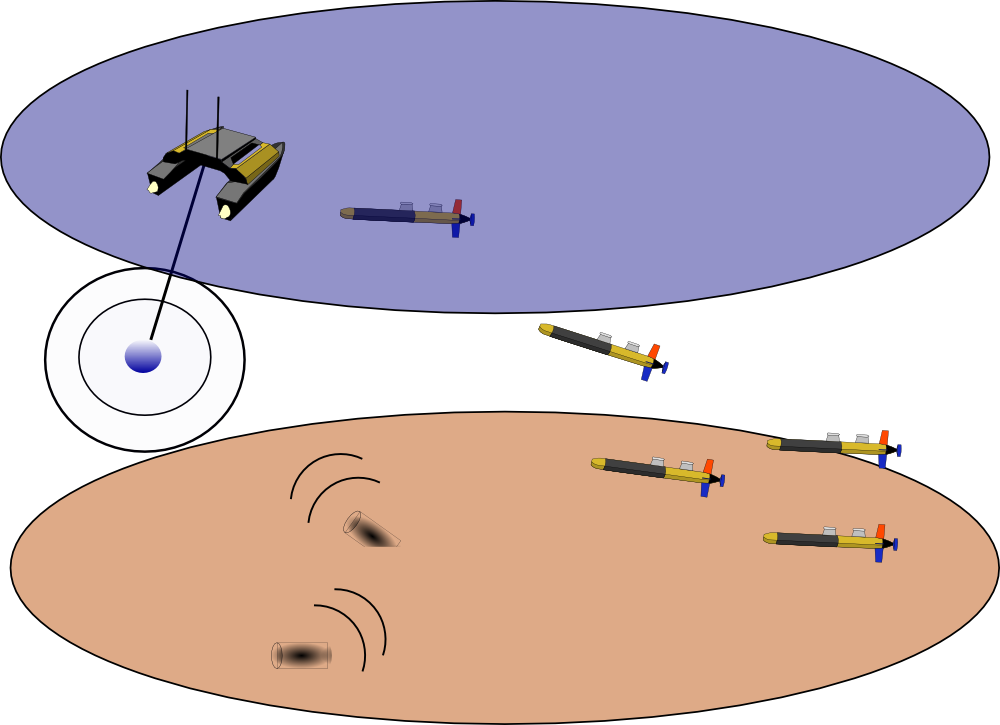
Underwater swarming
Development of multi-vehicle command and control methods for underwater sensing. Work is based on acoustic navigation approaches via iUSBL, Doppler shift, and differential absorption of sound in water.
Funded by Moore Foundation.

Arctic Seismo-acoustic Localization
Development, deployment, and analysis of data from geophone/hydrophone systems on sea ice for localization of fracture events. Collaborative work with CRREL, UAF, and others.
Funded by ONR (SIDEx).
Low-cost AUV navigation
Novel methods for low-cost underwater navigation; current focus in on single-hydrophone Doppler-based bearing estimation
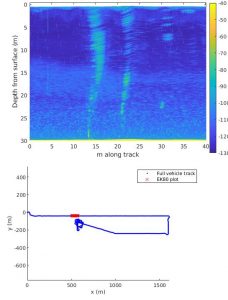
Spatial-temporal AUV sensing
Exploring autonomy techniques and technologies for quantification of spatially/temporally varying environmental phenomena in the ocean.

Autonomous Aquaculture Monitoring
Development of aquaculture monitoring systems, for AUVs, ROVs, and as low-cost autonomous systems. Focus on infrastructure, biological health/growth, and environment characterization.
Kelpbot: https://www2.whoi.edu/site/kelpbot/
Funded by ARPA-E MARINER
Previous Projects

Acoustics and Autonomy Payload for SandShark AUV
Acoustics and autonomy payload developed for SandShark AUV, including one-way travel time iUSBL system. Demonstrated in experiments at WHOI and MIT.
Seabed Target Multistatic Acoustic Characterization
SERDP SEED funded project looking at bistatic and multistatic acousti scattering for seabed target classification; culminated in experiments in Ashumet pond in Aug 2019.
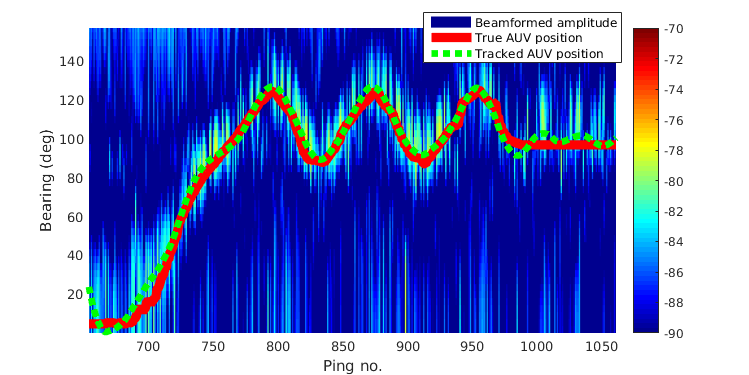
Passive AUV and Boat Tracking
Real-time passive acoustic tracking of AUVs and boats using dock-based and AUV-based low-cost hydrophone arrays.