Updates
Monitoring the dive

The OOI Remotely Operated Vehicle (ROV) was used to conduct an inspection (using the ROV cameras) of equipment on the seafloor. The ROV mission team monitors progress during the dive from a control station, with the lights out to enhance contrast for the imagery. Jared Schwart is in the foreground. Jennifer Batryn is to his…
Read MoreRare visitor

A Brown Booby (Sula leucogaster) rests on the bow of the R/V Neil Armstrong. This is a bird that is rarely found north of the Caribbean, and is an extreme rarity as far north as the Pioneer Array. Brown boobys feed on flying fish, and this bird may have been looking for its favorite prey…
Read MoreOSSM deployment

Deployment day for the Offshore Surface Mooring (OSSM). The Multi-Function Node (MFN) sits on the fantail of the R/V Neil Armstrong awaiting final testing. The acoustically-triggered release (yellow case) is connected to the ship’s winch wire and will be disconnected when the MFN reaches deployment depth.
Read MoreReady to go home

At the end of an expedition everyone’s eager to get home. Here the R/V Sikuliaq approaches NOAA’s pier in Newport, OR, but there’s one more chore to do – get that recovered equipment off the deck. You might be surprised at how quickly a motivated crew and science party can offload. Within 2 and half…
Read MoreOOI team members on trap

It’s a tradition for folks to sign the sediment traps as they are put out for six months at sea. This trap contains the names of the OOI team members who helped deploy this trap during Endurance 16.
Read MoreOSU greetings

Sediment trap team leader Jennifer Fehrenbacher (Oregon State Univ.) takes a photograph of the sediment trap signature that contains the names of her and Claudia Benitez-Nelson and Eric Tappa’s (Univ. South Carolina) team of foram ecology investigators.
Read MoreTen moorings to be recovered
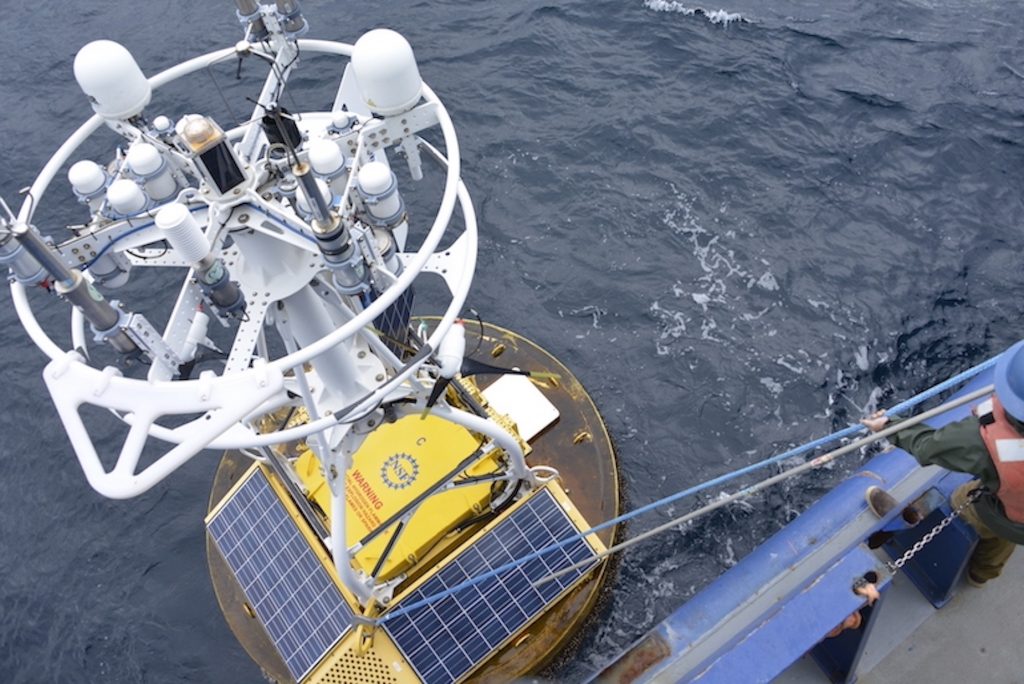
During Pioneer 18, ten moorings will be recovered. Once close to the ship, crew members grab the moorings with a hook, and direct them to the stern of the ship to be brought onboard
Read MoreGlider deployments
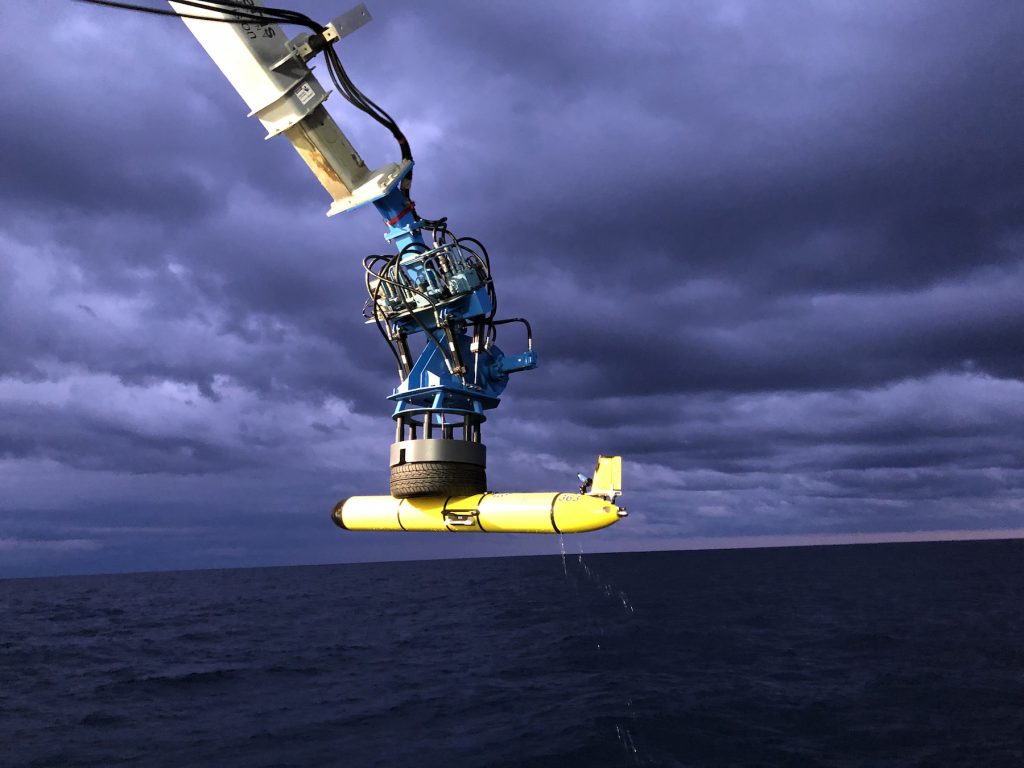
Three gliders will be deployed during Pioneer 18 and remain in the water for the next six months, collecting data in the water column between the Pioneer moorings.
Read MoreRemotely operated vehicle operations

Weather conditions and time constraints during the Pioneer 17 cruise precluded complete recovery of the Offshore and Upstream Offshore Profiler Moorings. If time and conditions permit, Remotely Operated Vehicle (ROV) lead Jared Schwartz will used an ROV to complete the recovery of these two moorings, as well as several anchor recoveries.
Read MoreTwo-leg expedition

The Pioneer 18 Recovery and Deployment mission will be conducted in two legs. The back deck of the R/V Armstrong will be filled with equipment on both legs as the team recovers ten moorings and deploys eight moorings and three gliders. Shown here are three coastal surface moorings.
Read More