Updates
First of First
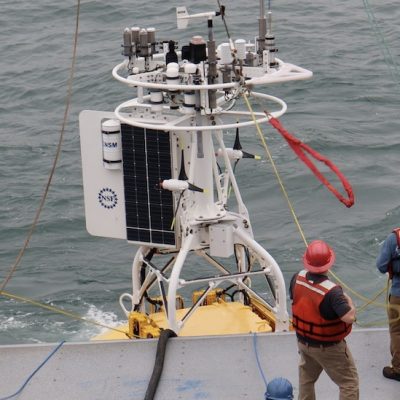
This morning, April 3, 2024, marked the beginning of the Coastal Pioneer Array in its new location in the Mid-Atlantic Bight. The team began prepping for the deployment of the Central Surface Mooring (CNSM-1) at 6 am Eastern. The mooring was in the water and its instruments functioning shortly after 9 am. Well done, team!
Read MoreCTD Casts While Underway
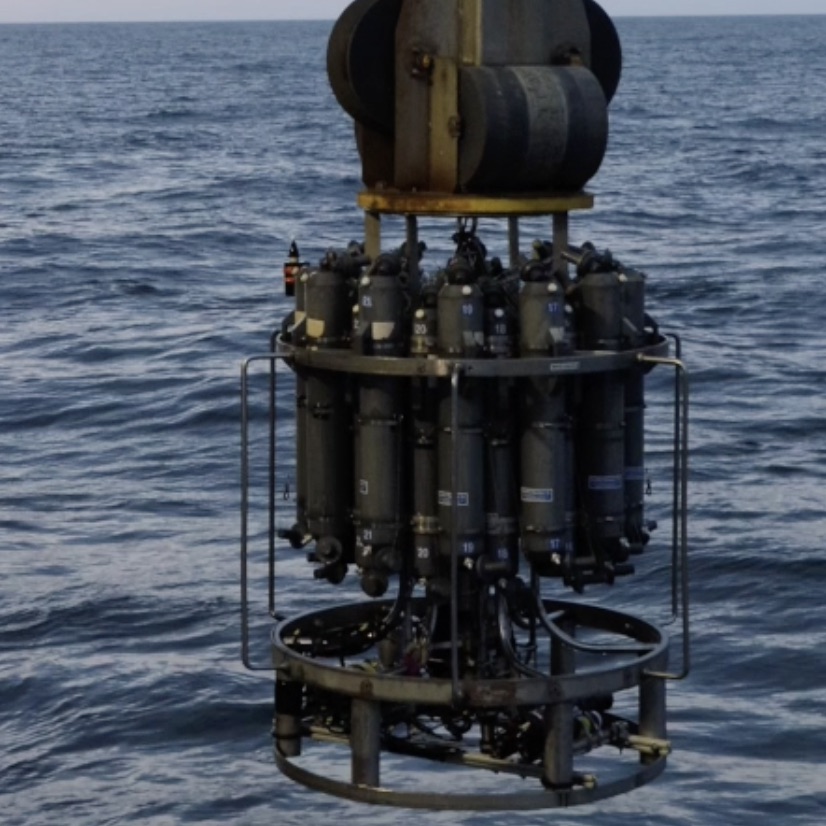
During transit to the Mid-Atlantic Bight from Woods Hole, the team conducted CTD sampling to continue the work of The Northeast U.S. Shelf (NES) Long-Term Ecological Research (LTER), which strives to understand and predict how planktonic food webs are changing in the region and possible impacts on higher trophic levels.
Read MoreCrabs Galore
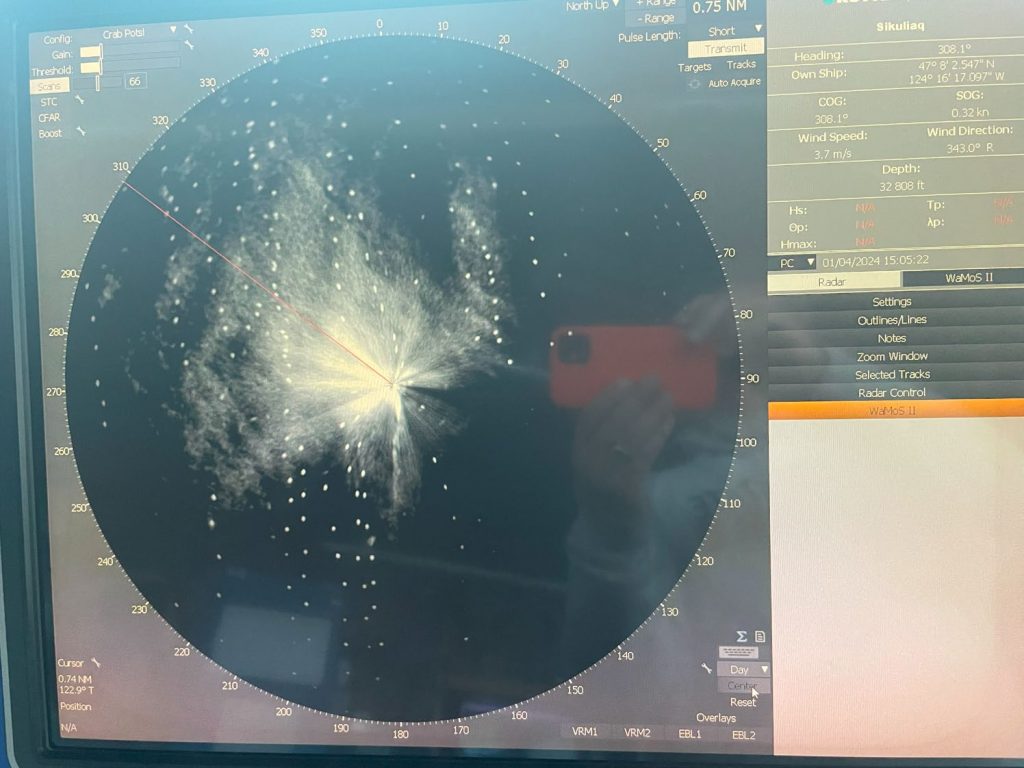
Image of crab pots surrounding the ship as the R/V Sikuliaq and the Endurance 20 team were adjacent to the Washington Inshore Surface Mooring. The primary purpose of this radar is to detect sea ice, but it works well on crab pot floats too. The circle’s radius is ¾ nm.
Read MoreSecure Back Deck
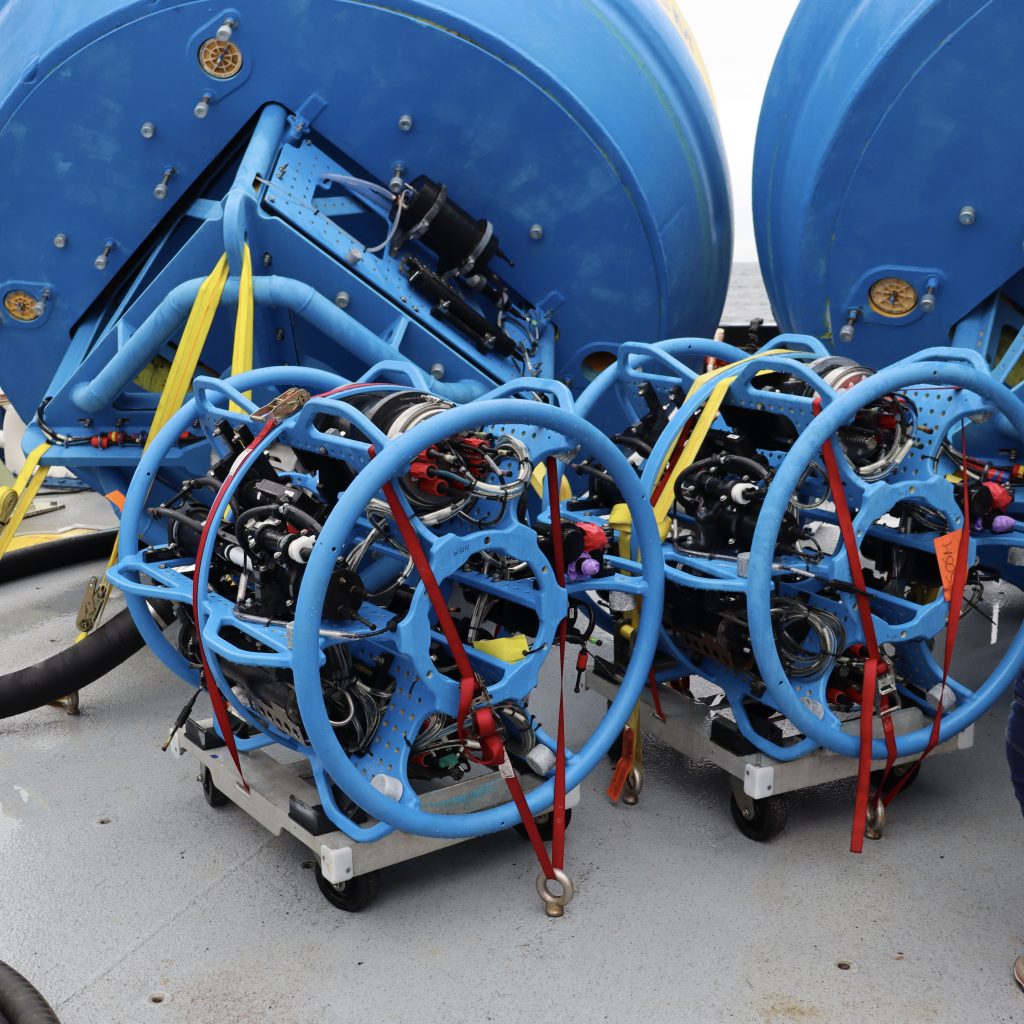
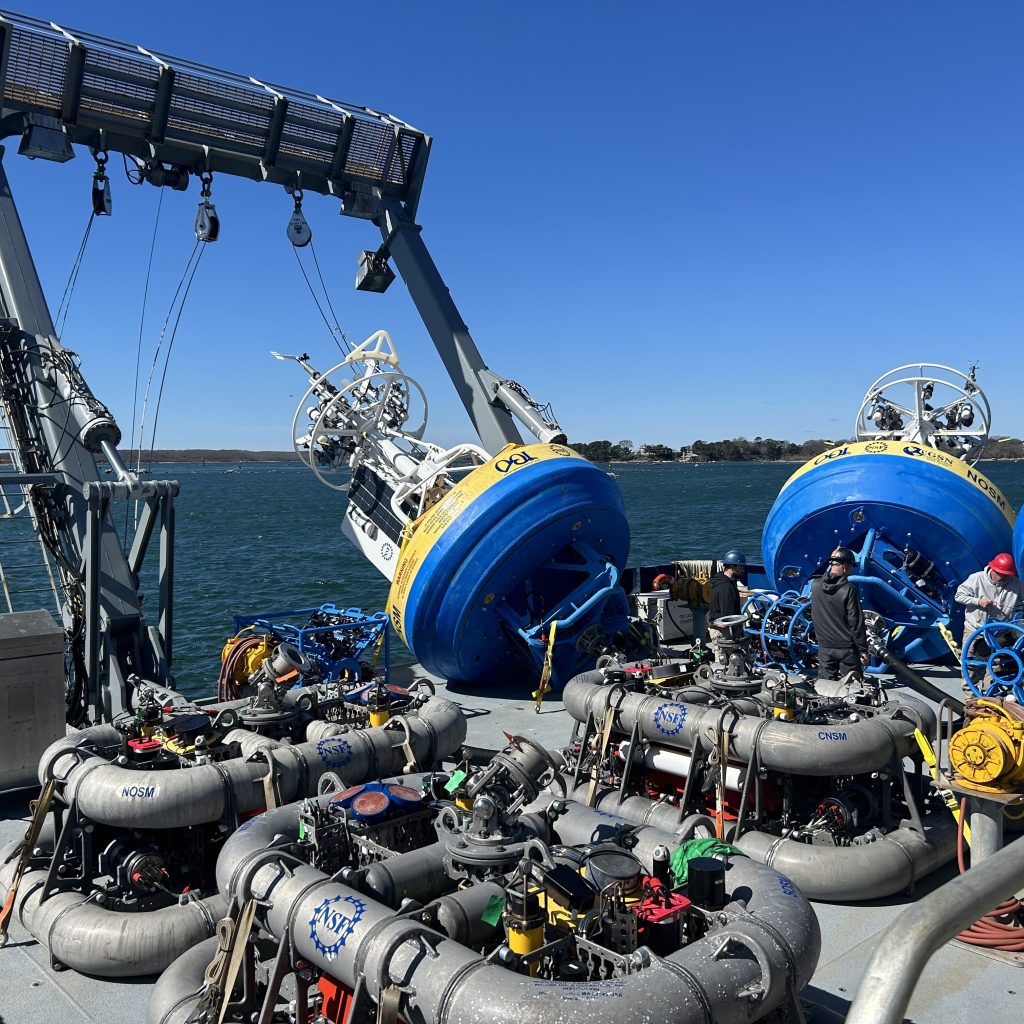
The R/V Neil Armstrong is fully loaded with ocean observing equipment for the first deployment of the Coastal Pioneer Array at the Mid-Atlantic Bight. To ensure all equipment stays in place, regardless of conditions, the ship’s back deck has holes drilled into the floor that allows the team to securely fasten and tie-down the…
Read MoreSurvival Suit Training

Safety training happens as soon as the ship is underway. Here Andy Robinson dons a survival suit and demonstrates how to get air out of it for maximum effectiveness.
Read MoreAnd We’re Off!

IMG_9893 And we are off! The Coastal and Global Scale Nodes team is aboard the R/V Neil Armstrong headed to the Mid-Atlantic Bight for the first deployment of the Pioneer Array there. This is the view from the ship as we head to sea for the next 10 days.
Read MoreLoading Complete
Pioneer MAB surface moorings and vehicles were loaded on the RV Neil Armstrong. The team setup the moorings for deployment, verified instrument operation, and prepared the shipboard labs for cruise operations.
Read MorePrawler Testing Completed
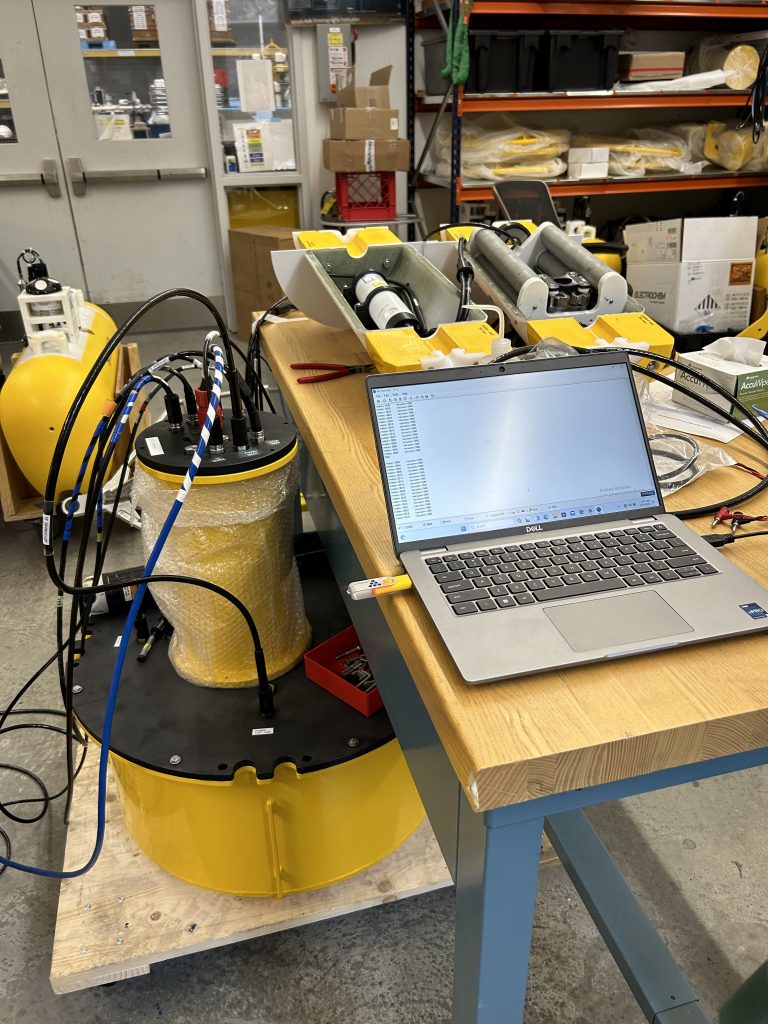
The CGSN team monitors the testing and burn-in of the Pioneer MAB Prawler profiling vehicle, the Shallow Water Mooring controller and towers. The testing will confirm that the vehicle is successfully communicating inductively to the controller, and the controller is telemetering the data to shore.
Read MoreTeam Effort

It is definitely a team effort! Chris Basque, Eric Hutt, John Jordan, John Kemp, Matt Latvis, Nico Llanos, Kris Newhall, Jim Ryder all on deck completing the connections of the electromechanical chains and stretch hoses to the surface moorings and Near-Surface Instrument Frames.
Read MoreAssembling Anchor Recovery Module

Meghan Donohue assembles an Anchor Recovery Module (ARM). The ARM includes the anchor for the Multi-Function Node (MFN) as well as a flotation module and recovery line. The flotation module and recovery line allow the MFN anchor to be recovered, leaving nothing behind, and minimizing the impact to the seabed environment.
Read More