Today was our last work day on the first leg of Pioneer 17. The recovery of the Inshore Surface Mooring was first on the agenda. Recovery starts when an acoustic command is sent from the ship causing the anchor to be released from the multi-function node (MFN), which houses it. Sometimes even though the release is activated, the mooring stays in place. This happened during the recovery of the Central Surface Mooring. In that case, we can hook the buoy and give it a bit of a tug, releasing it from its anchor. That is what we did successfully for the Central Surface Mooring.
The Inshore Surface Mooring had a similar issue. After sending multiple release commands, the mooring remained anchored to the seafloor.

The Inshore Surface Buoy was brought to the starboard side of the ship, where members of the team secured it with a titanium hook, then guided it back to the stern of the ship.
The captain then tried to release the anchor by pulling the buoy back over the anchor position to give it a nudge. This proved to be unsuccessful in dislodging the mooring from the anchor. Luckily, we have a remotely operated vehicle (ROV) onboard that gave us eyes underwater. It was deployed and sent to the site of the MFN that encompasses the anchor to try to see what, if anything, might be keeping the MFN and the anchor on the seafloor.
The ROV found the MFN and did multiple surveillance rounds around it. All looked in order, with no obvious problem. Because of the rough sea conditions, the decision was made to leave the Inshore Surface Mooring in place for the time being. A second attempt will be made during Leg 2 to recover the mooring with the assistance of the ROV if favorable weather and sea conditions allow. The goal of Leg 2 is the deployment of six Profiler Moorings and recovery of five Profiler Moorings. If the Inshore Surface Mooring is successfully recovered on Leg 2, there might not be room on deck to recover all of the Profiler Moorings. Those recoveries have been prioritized and decisions regarding what can be recovered and when will depend upon weather, sea conditions, and time available. This conundrum is an example of when the vagaries of weather, waves, and equipment dictate decisions at sea.
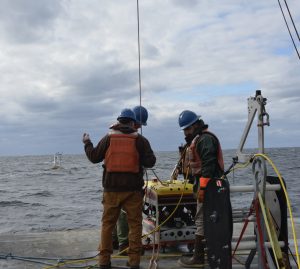
The Pioneer 17 team prepares the Remotely Operated Vehicle for a reconnaissance mission on the seafloor to determine why the Inshore Surface Mooring failed to release from the anchor.
Around mid-day, the R/V Neil Armstrong left the area of the Inshore Surface Mooring to steam across the shelf to recover the AUV “Scotland” from its 24-hour mission. The swells were high, but in tribute to the experience of the crew, the AUV was hooked and successfully recovered. After “Scotland” was onboard, we transited back across the shelf to pick up the AUV “Rogers” before heading back to Woods Hole. At each AUV deployment and recovery location, a CTD cast was conducted to collect water samples to validate the instrument readings.
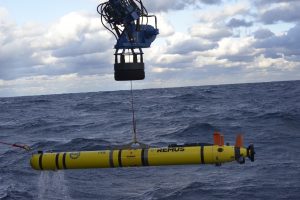
The AUV “Scotland” was the first AUV to be brought back onboard. It was hooked in 10–12-foot rolling swells.
Images and Text by Darlene Trew Crist©WHOI.
Recent Updates