
Posts Tagged ‘MAB’
AUV Captured
Once the first AUV had finished its 20-hour transect, it was time to get her back onboard. The Glider Team directed the AUV to surface close to the ship. The AUV was visible with a blinking beacon. A team stood by at the starboard side of the deck with long poles with recovery hooks. …
Read MoreHoses Galore Hold Moorings Together

A flexible connection between the buoy and the anchor of the Coastal Surface Moorings of the Pioneer MAB Array is created by multiple hoses with the capacity to stretch while maintaining an electrical connection (Fig 1). The stretch is necessary to account for wind, waves and currents that push and pull the buoy relative to…
Read MoreAUVs Launched
The first of two Autonomous Underwater Vehicles (AUVs) were launched from the R/V Neil Armstrong this morning for a 20-hour transect. The second will be launched about four hours later. Both will travel with the confines of the Pioneer Array. The first will do a cross-shelf survey, the second will travel along the shelf. The…
Read MoreTwo More Gliders Deployed

Two versions of the Teledyne Gliders were deployed on April 5, 2024 at the Pioneer Array Mid-Atlantic Bight site. While testing of both models has been successfully conducted, this is the first time the Teledyne G3 model will be sampling in the same location as the earlier model, Teledyne G2 model. This dual deployment is…
Read MoreThird Surface Mooring Deployed

The rear deck of the R/V Neil Armstrong is feeling a little empty with the successful deployment of the third and final surface mooring. This time it was the Southern Surface Mooring. The skies had cleared, the swell lessened, and many on the back deck saw a humpback whale breech as the mooring entered into…
Read MoreGlider On Its Way

Glider Lead Diana Wickman and Glider Tech Andy Robison gently lift Glider 379 into the water for its six month deployment within the Pioneer Array in the Mid-Atlantic Ridge. Chief Scientist Al Plueddemann handles the tugger, which helps lift the 123 pound glider into the water.
Read MorePrep Back Home

Don Peters and Kris Newhall measure the dry weight and verify the stability of the Shallow Water Mooring (SWM) buoy. The SWM design developed by WHOI Principal Engineer Don Peters, when combined with the Prawler profiling vehicle and instruments on the buoy hull, will be able to sample the upper 80% of the water…
Read MoreSecond Mooring Deployed

The second mooring of the Coastal Pioneer Array MAB, the North Central Surface Mooring, was successfully deployed today from the R/V Neil Armstrong. The team made it look easy! For those who lack time, we’ve sped it up to give you an idea of what’s entailed.
Read MoreFrolicking Sea State

The sea was rocking and rolling a little bit yesterday causing the “wet lab” where we work aboard the R/V Neil Armstrong to live up to its name. The metal door jam at the bottom with yellow and black tape was installed as a preventive measure to keep the working space dry. Credit: DT Crist © WHOI.
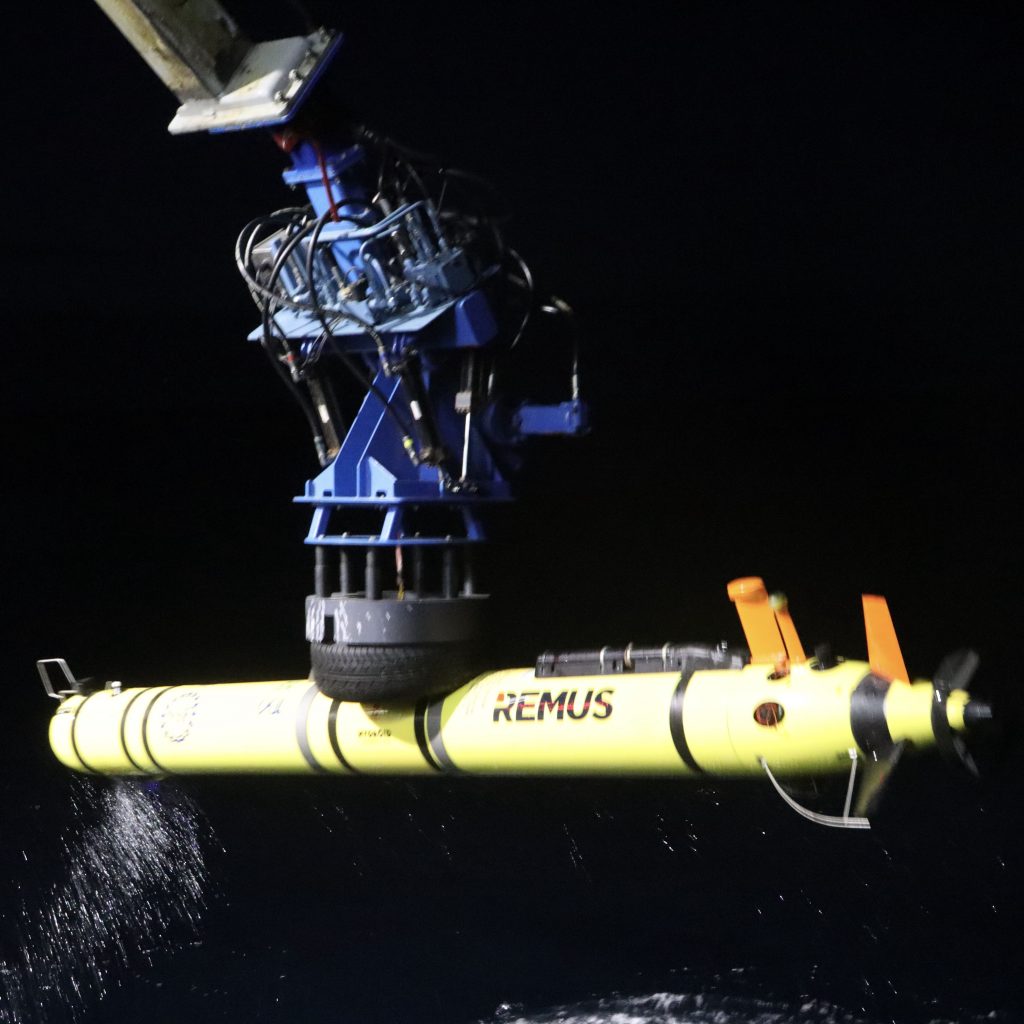
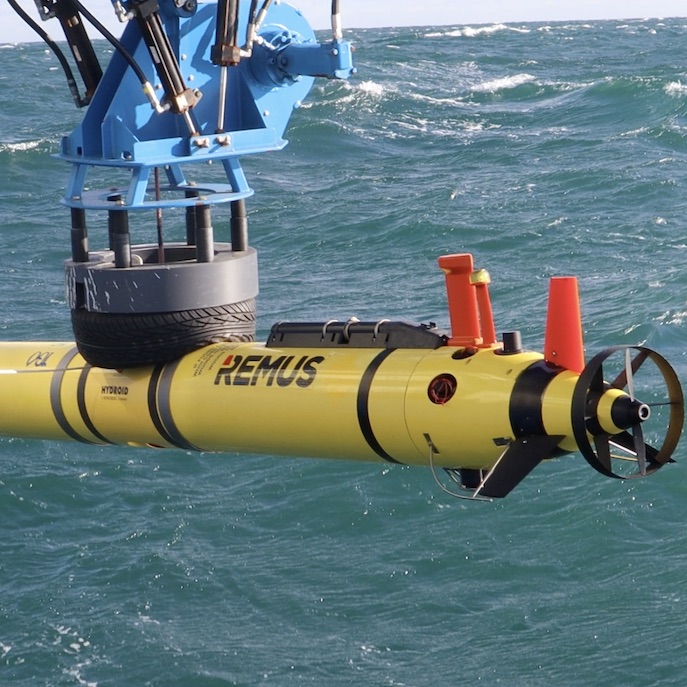
Read MoreRemarkable Underwater Robot

Two REMUS 600 autonomous underwater vehicles (AUVs) are components of the Coastal Pioneer Array at its new location in the Mid-Atlantic Bight (MAB). Their mission is to collect data through the water column and in between moorings, serving as an additional data source and validating data collected at the stationary moorings. The two AUVs at…
Read More