Posts Tagged ‘Coastal Pioneer Array’
Remarkable Underwater Robot

Two REMUS 600 autonomous underwater vehicles (AUVs) are components of the Coastal Pioneer Array at its new location in the Mid-Atlantic Bight (MAB). Their mission is to collect data through the water column and in between moorings, serving as an additional data source and validating data collected at the stationary moorings. The two AUVs at…
Read MoreFirst of First
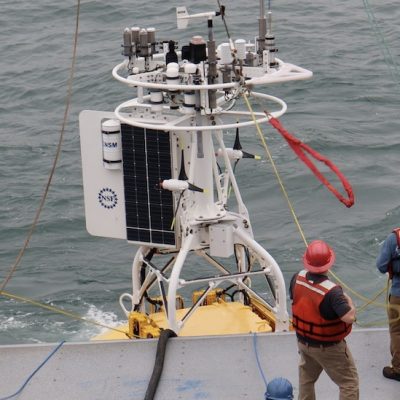
This morning, April 3, 2024, marked the beginning of the Coastal Pioneer Array in its new location in the Mid-Atlantic Bight. The team began prepping for the deployment of the Central Surface Mooring (CNSM-1) at 6 am Eastern. The mooring was in the water and its instruments functioning shortly after 9 am. Well done, team!
Read MoreSecure Back Deck
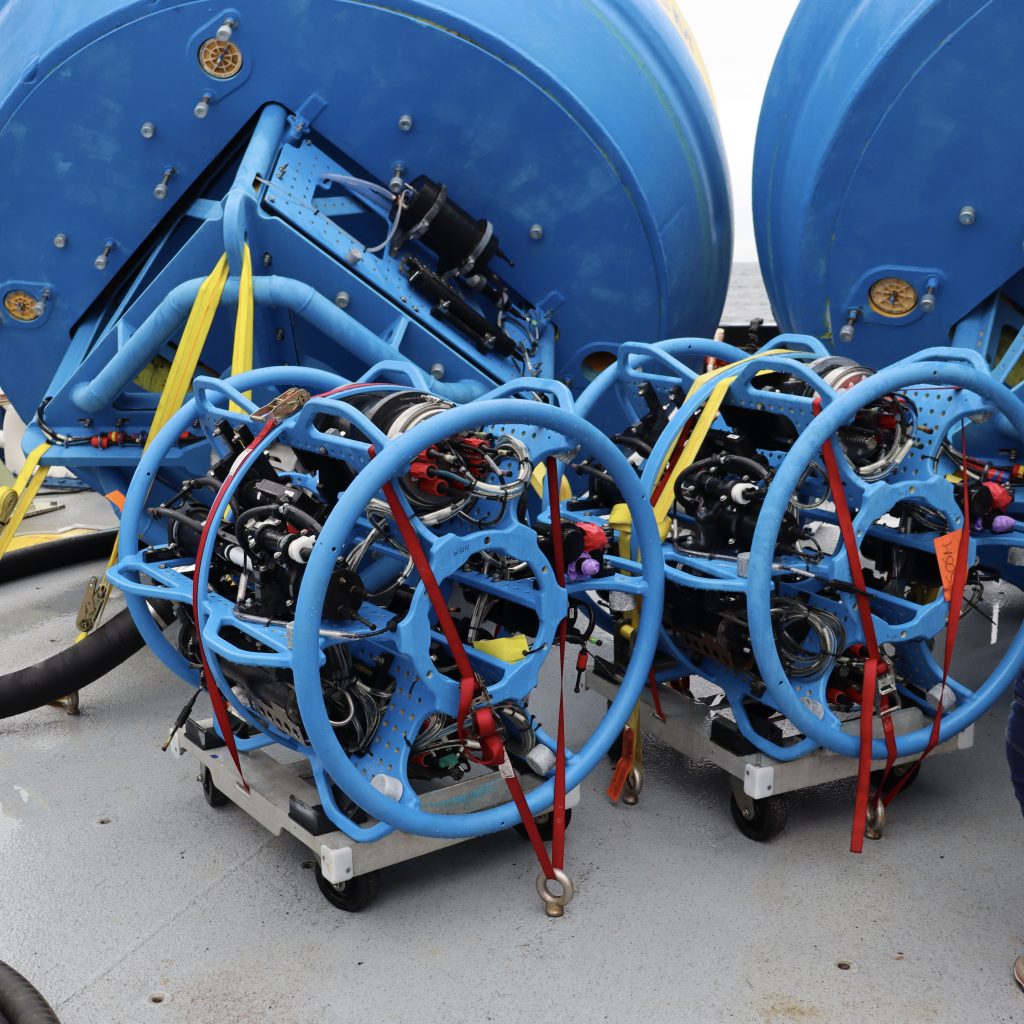
The R/V Neil Armstrong is fully loaded with ocean observing equipment for the first deployment of the Coastal Pioneer Array at the Mid-Atlantic Bight. To ensure all equipment stays in place, regardless of conditions, the ship’s back deck has holes drilled into the floor that allows the team to securely fasten and tie-down the…
Read MoreSeabed Survey
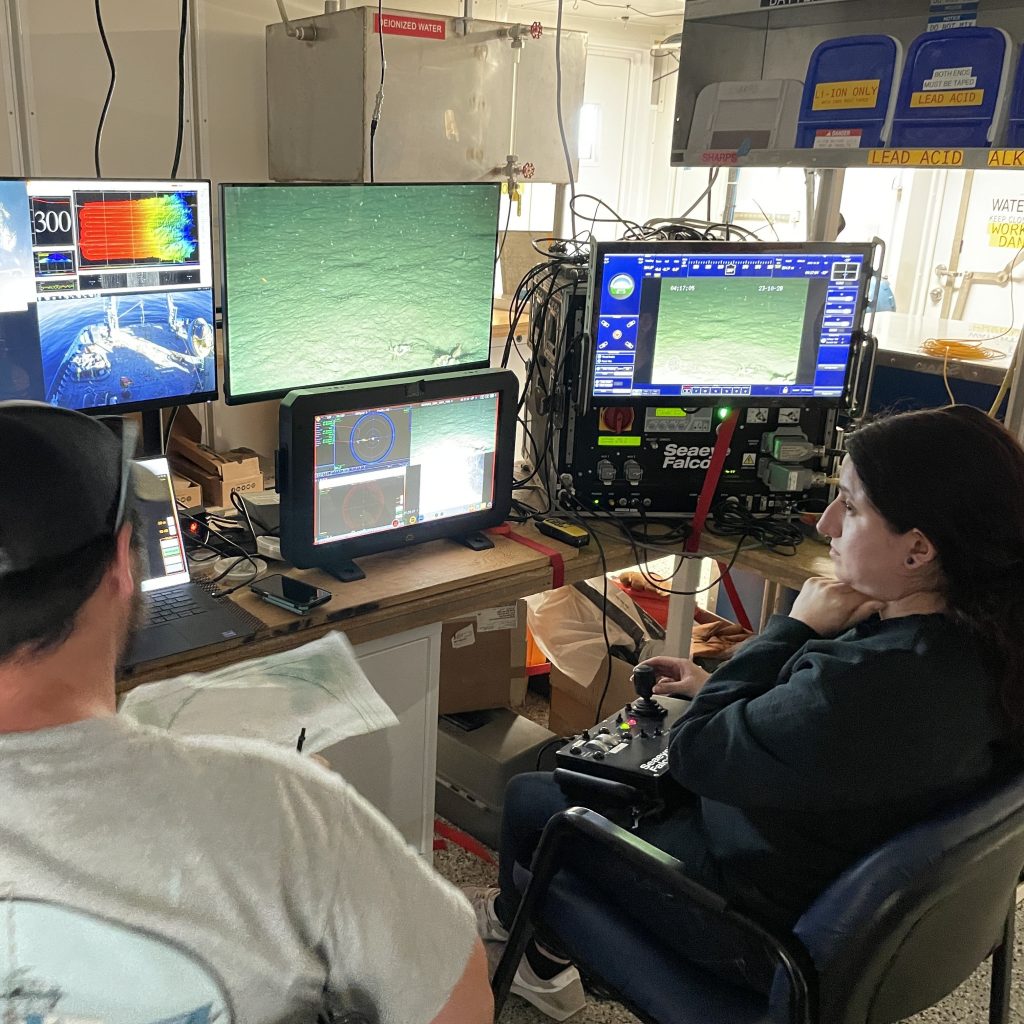
The OOI-CGSN team surveyed the seabed to better understand the layout of the proposed moorings sites. The RV Neil Armstrong operated a hull-mounted acoustic equipment to collect bathymetry (depth contours), backscatter imagery (seabed characterization), and subbottom data (seabed profile and geophysical layering). Chris Basque, Irene Duran, and John Lund also piloted the ROV over the…
Read MoreSafe and Sound

Here the test Coastal Surface Mooring is safely on deck after ~8 months operating at the proposed Pioneer Mid-Atlantic Bight location. The mooring was deployed in a water depth of 30m and survived storms with max wave heights of 7.5-10m, and continued to send data to shore!
Read MoreSurface Mooring Recovery

It may seem calm at the surface, but there’s a lot of action below…The OOI-CGSN team used the Remotely Operated Vehicle (ROV) to inspect the Coastal Surface Mooring and the Multifunction Node (MFN) prior to recovery. Chris Basque and John Lund then piloted the ROV over to the MFN and attached a hook and recovery…
Read MoreSunrise at Sea

Chris Basque, Woods Hole Oceanographic Institution deck lead, takes advantage of the calm seas and bright sunrise to survey the work area and plan the recovery of the test Coastal Surface Mooring located at the proposed Pioneer MAB Array site.
Read MoreAs Seen from Below
Everything looks good! The Remotely Operated Vehicle was deployed by the OOI-CGSN team to inspect the underwater components of the Shallow Water Mooring after deployment. The ROV captured images of the Multifunction Node sitting on the seabed (1), the mechanical bend restrictors on the riser (2), and an image of the Prawler profiling vehicle moving…
Read MoreAs Seen from the Air

And here’s what the successful deployment of OOI’s experimental surface mooring off Martha’s Vineyard looked like from the air.
Read MoreArmstrong on the Way

The OOI-Coastal and Global Scale Node (CGSN) team will deploy the Shallow Water Mooring south of Martha’s Vineyard enroute to the proposed Pioneer Mid-Atlantic Bight (MAB) location. Once at Pioneer MAB, they will recover the test Coastal Surface Mooring after 8 months collecting engineering data. They will also perform surveys and ROV inspections of potential…
Read More